Descripción:
Este proyecto a realizar se trata de un pequeño juego llamado laberinto.Este
laberinto está inspirado en un juego de antaño. Nuestra labor, será
actualizarlo a nuestro tiempo.
El proyecto de laberinto es un juego con diferentes temáticas, deberás pensar el objetivo del juego que vas a realizar.
Para ello
necesitas saber qué materiales y que características debe tener nuestro proyecto.
Description :
Ce projet à réaliser est un petit jeu appelé Labyrinthe.
Ce labyrinthe est inspiré d'un jeu d'antan. Notre tâche sera de le mettre à jour à notre époque.
Le projet de labyrinthe est un jeu avec différentes thématiques, vous devrez réfléchir à l'objectif du jeu que vous allez réaliser.
Pour ce faire, vous devez savoir quels matériaux et quelles caractéristiques notre projet doit avoir.
Exemple :
Partes: Parties :
- 2
servomotores
- 1 joystick
- 1 Arduino
- Impresiones
3D impression 3D
Medidas:
Laberinto con
medidas de 99 x 99 x 9 milímetros
Muros perimetrales de 2 mm, pasadizos
de 7 mm y muros internos de 1 mm
Mesures:
Labyrinthe avec des dimensions de 99 x 99 x 9 millimètres
Les murs périphériques font 2 mm, les passages 7 mm et les murs internes 1 mm.
Exemple :
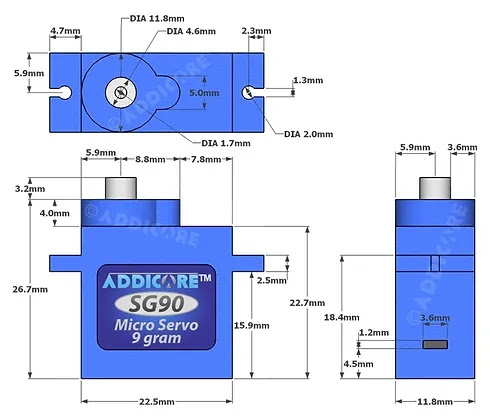
Sujetadores para los servomotores:
Fixations pour les servomoteurs:
Medidas a obtener del servo SG90
Obtenir les mesures du SG90.
Aquí deberás mostrar las habilidades adquiridas en sketchup
Vous devrez montrer les compétences acquises en SketchUp ici.
CÓDIGO DE OPERACIÓN : CODE D'OPERATION:
#include <Servo.h> // servo library
int EJEX;
int EJEY;
int servoX;
int servoY;
Servo servo1, servo2; // servo names
void setup()
{
pinMode(A4, INPUT);
pinMode(A5, INPUT);
servo1.attach(3);
servo2.attach(5);
Serial.begin(9600);
}
void loop()
{
EJEX = analogRead(A4);
EJEY = analogRead(A5);
Serial.print("Eje X :");
Serial.println(EJEX);
Serial.print("Eje Y :");
Serial.println(EJEY);
servoX = map(EJEX, 0, 1023, 110, 80);
servo1.write(servoX);
servoY = map(EJEY, 0, 1023, 110, 80);
servo2.write(servoY);
}